
Program your Industrial Robots using SprutCAM
Programming of industrial robots is a quick and straightforward process in SprutCAM. SprutCAM can be used for cutting, milling, painting, welding, and other applications. The programming process of an industrial robot is the same as the conventional milling machines except for the robot that has 6 degrees of freedom and more.
In addition to excessive degrees of freedom, a robot can reach the desired position of the tool relative to the workpiece in several different states. The state to be used in operation can be specified in the Operation Setup with the flip base, flip elbow, flip wrist checkboxes as well.
How to program Robots in SprutCAM?
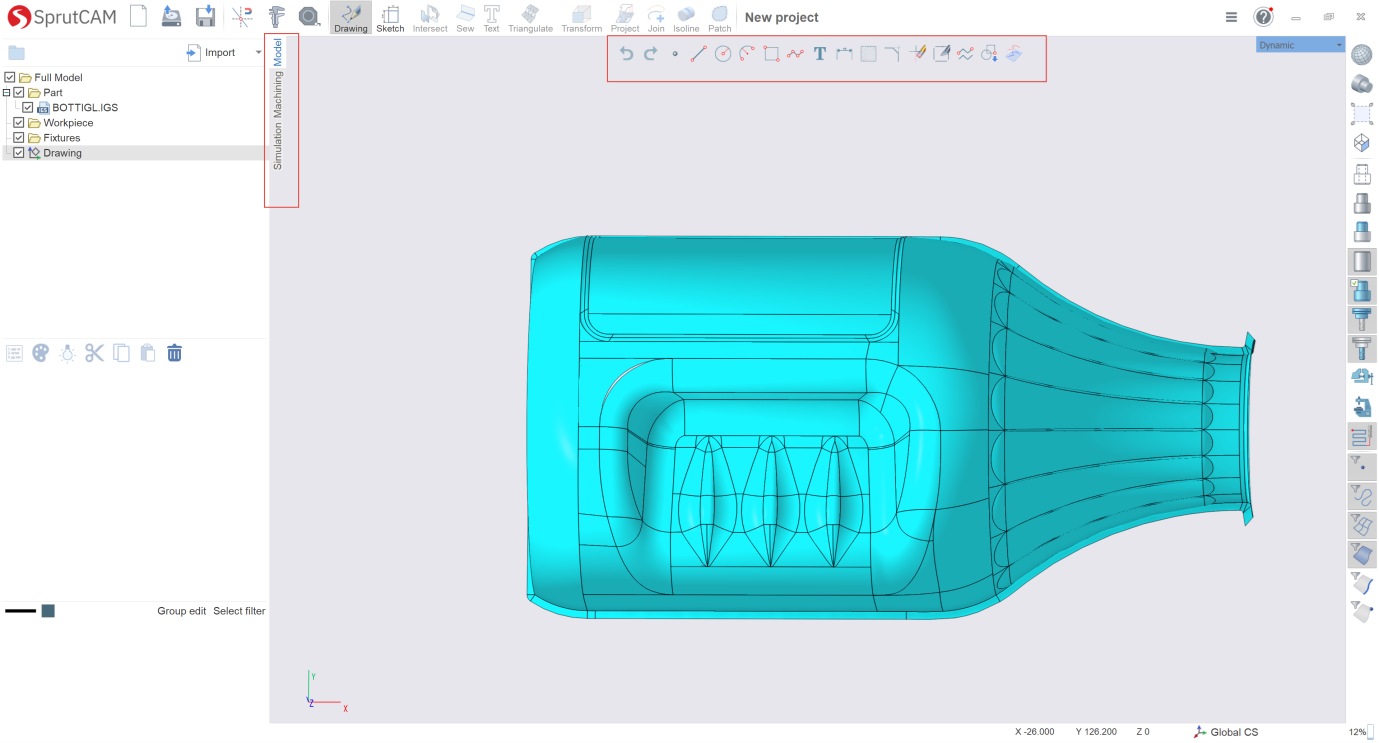
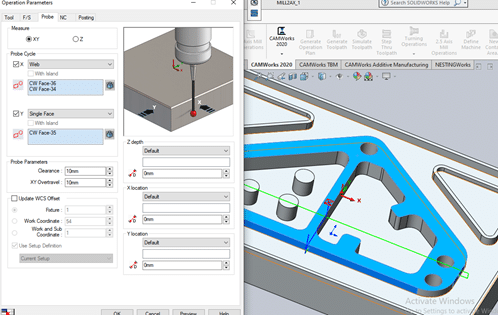
Setting coordinate system of the tool and workpiece
Tool coordinate system
Workpiece coordinate system
Programming the robot’s 6th axis
In SprutCAM there are two ways of programming the 6th axis:
- Automatic
- manual
In an automatic way, it is done by the two modes,
Fixed vector
Direct to point
The manual way of programming the 6th axis is done by using the Robot Axes Map.
Programming the rotary table
A robot can be equipped with a rotary or a tilting rotary table which has one and two additional rotary axes, respectively.
If the kinematic scheme of a robot has a rotary table, the operation setup contains the following parameters.
- The Rotary axes initial positions for the operation.
- The Rotate (rotary axis) options.
- The Flip table option.
- Additional parameters for the rotary table control.
Robot axes map
The Robot Axes Map allows to define manually and fine-tune automatic control laws for the excessive degrees of freedom of a robot (the 6th axis, the rails axes, the rotary table axes). This feature is available at the Operation Setup.
Programming robot transitions
The programming of the robot’s transitions between operations is done by specifying the Approach and Return points in the Operation Setup.
For more information on SprutCAM Software and product inquiries, visit us at https://nctools.com.au/ or call us on +61 3 8618 6884